这下,你打人形机器人,它真的会「疼」了。
来自香港城市大学的研究团队提出了一种全新的神经形态机器人电子皮肤(neuromorphic RE-skin,NRE-skin)。

NRE-skin通过模仿人类神经系统,利用分层(Hierarchical)的神经形态架构,让触觉信号不再需要传到中央处理器,而是在皮肤内部就完成了初步处理与脉冲编码。
基于这一仿生设计,NRE-skin同时实现了三项关键能力:
高分辨率触觉感知:高效采集并编码精确的压力和位置信息。
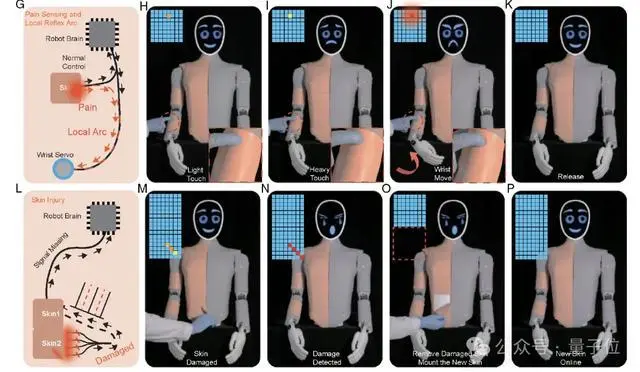
主动保护机制:具备局部反射机制,能够进行主动疼痛感知与损伤检测。
维护高效性:支持快速更换的模块化快拆结构。
网友表示这种复杂而精细的触觉感知,将会为机器人领域带来一次巨大的跃迁。
而这一研究也无疑会为后续的触觉反馈算法和硬件设计提供新的思路。
接下来我们具体来看。
把触觉转成“神经脉冲”
相比于以往的电子皮肤,NRE-skin没有继续沿用传统电子皮肤的“模拟信号采集”思路,而是模拟人类,直接把触觉转译成神经元式的脉冲信号。
在生物系统中,感觉信号经历的是一个分级处理过程:刺激由末梢神经的局部“感受野”捕获并编码,再通过神经纤维层层递进、逐渐聚焦,最终形成完整的感觉信息传导至大脑。
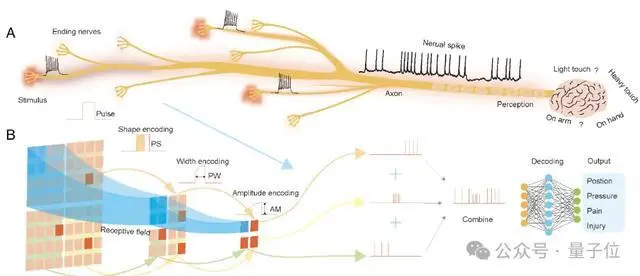
NRE-skin遵循这一思路,在硬件层面实现了“传感器即神经元”的设计:它将每个压力传感器直接与一个微型振荡电路相集成。
当皮肤感知压力时,传感器的电阻变化会即时调控振荡电路,导致其输出的脉冲信号频率发生改变。
具体而言,压力越大,脉冲发射得越密集,以此完成压力强度到脉冲频率编码的直接转译。
更巧妙的是,为了精确定位,每个传感器被赋予了一组独特的无源元件(电阻R和电容C)作为其“位置指纹”。
这些元件的配置使得每个位置发出的脉冲,在形状、宽度或幅度上都具有独一无二的特征。
由此,NRE-skin通过这种“频率-强度,特征-位置”的编码方式,将所有复杂的触觉信息高效地汇聚到单一传输通道中。
分层(Hierarchical)处理
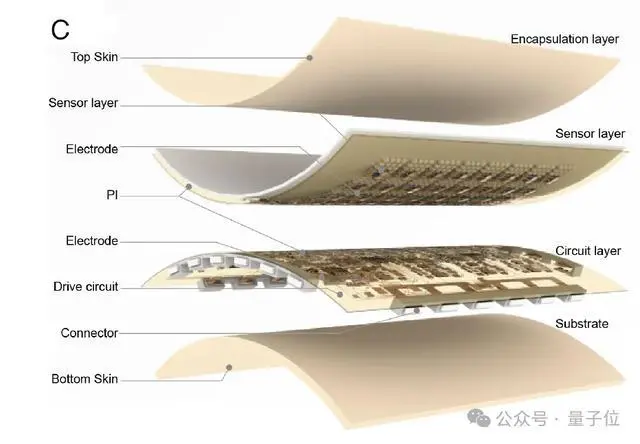
在将触觉信息编码为脉冲信号后,NRE-skin借鉴人类皮肤的分层处理,设计了四层结构(封装层、传感层、电路层、基底层) 。
而且还在电路层面建立了分层的、神经状的感受野结构,以实现信号的渐进降维和数据流简化。
在生物系统中,人类皮肤的功能由精密的四层结构支撑:角质层、表皮层、真皮层和皮下组织。
这些层级中蕴含着高度复杂的感觉系统,分布于真皮和表皮的多种机械感受器与分层的神经感受野共同构成了信息采集与处理的一体化网络。
该网络将触觉刺激分为两类:
基础感知(如剧烈疼痛)通过脊髓反射弧快速处理,触发无需大脑参与的局部自动反应(如缩回)。
复杂感知(如刺激强度的精确定位和损伤识别)则会被逐级传递至大脑皮层,进行更深层次的分析和决策。
与之类似,NRE-skin也采用了类似的四层结构,将感觉信号从外周逐级传递至更高层级的处理中心,实现了从粗到细的定位与筛选:
封装层:模拟角质层,提供表面的机械保护和整体防护。
基底层:模拟皮下组织,提供缓冲,吸收外力冲击,并作为机械支撑。
传感层:对应人类的机械感受器,负责感知外部刺激(如压力),并将其转换为电信号。
电路层:对应人类的信号传导神经,NRE-skin的核心。负责脉冲编码、信号处理、局部反射决策。
在四层结构中,电路层是NRE-skin 的核心处理模块。
它位于传感层之下,负责将压力刺激转换为脉冲序列,并通过一套模拟生物感觉处理机制的人工感受野网络对信号进行初步处理,实现渐进降维和数据流简化。
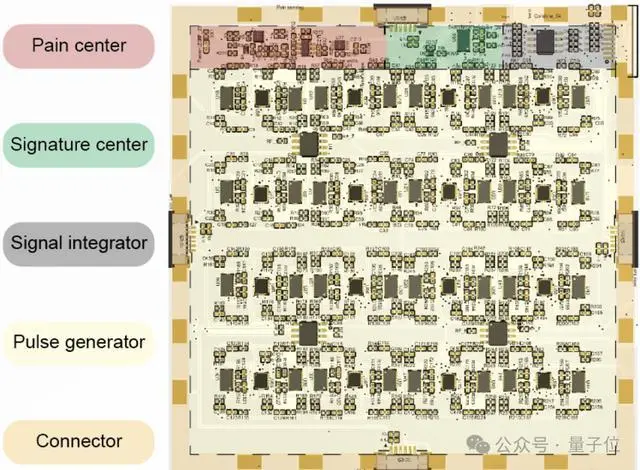
电路层被进一步细分为五个关键功能区域:
疼痛中心:用于疼痛信号评估、
特征中心:用于识别信号来源的皮肤模块
信号整合器:用于合并各路输出
脉冲发生器:用于生成脉冲序列
和连接器(用于与外部皮肤模块连接
在此基础上,研究人员进一步集成了两大高级功能:
主动疼痛感知与局部反射
NRE-skin具备基于疼痛阈值触发的局部反射机制。电路层面的“疼痛中心”实时监测脉冲频率所反映的压力强度。
一旦压力超过阈值,系统会绕过中央处理器,直接触发类似脊髓反射弧的机制,实现毫秒级的即时保护动作(如缩回),大幅提升机器人的安全响应能力。
损伤自检与模块化维护
NRE-skin 通过检测传感器周期性产生的“活脉冲”状态,实现了皮肤损伤的精确自检和定位。
一旦脉冲停止,即意味着皮肤受损。结合其模块化快拆设计,这极大地简化了受损皮肤单元的快速更换与维护流程。
总体看来,NRE-skin 不仅是一种更高效的电子皮肤,更是一种具备自主感知、实时判断和自我保护机制的仿生智能系统,为未来制造更安全、更具人性化的仿人机器人奠定了坚实的工程基础。
这篇论文的第一作者是来自香港城市大学的高育育。

他目前是港城大学的博士后,研究方向包括触觉感知(Tactile Sensing)和柔性电子(Flexible Electronics)。
他本科和硕士都毕业于西南交通大学,博士毕业于香港城市大学。